
La conduite autonome est la nouvelle frontière technologique des constructeurs d’automobiles. Déjà disponible (avec de sérieuses limites) sur des modèles haut de gamme allemands, le contrôle automatique par l’électronique de la vitesse et de la trajectoire est bien entendu un défi aussi pour Land Rover. La marque à l’ovale vient de dévoiler certaines technologies, qui sont logiquement adaptées à la conduite en tout terrain.

Vu son ADN, Land Rover ne peut se limiter à une conduite autonome « classique » et doit proposer aussi des technologies qui fonctionnent en tout terrain. Cela passe par l’utilisation de capteurs très évolués, capables de communiquer au véhicule des images en 3D:
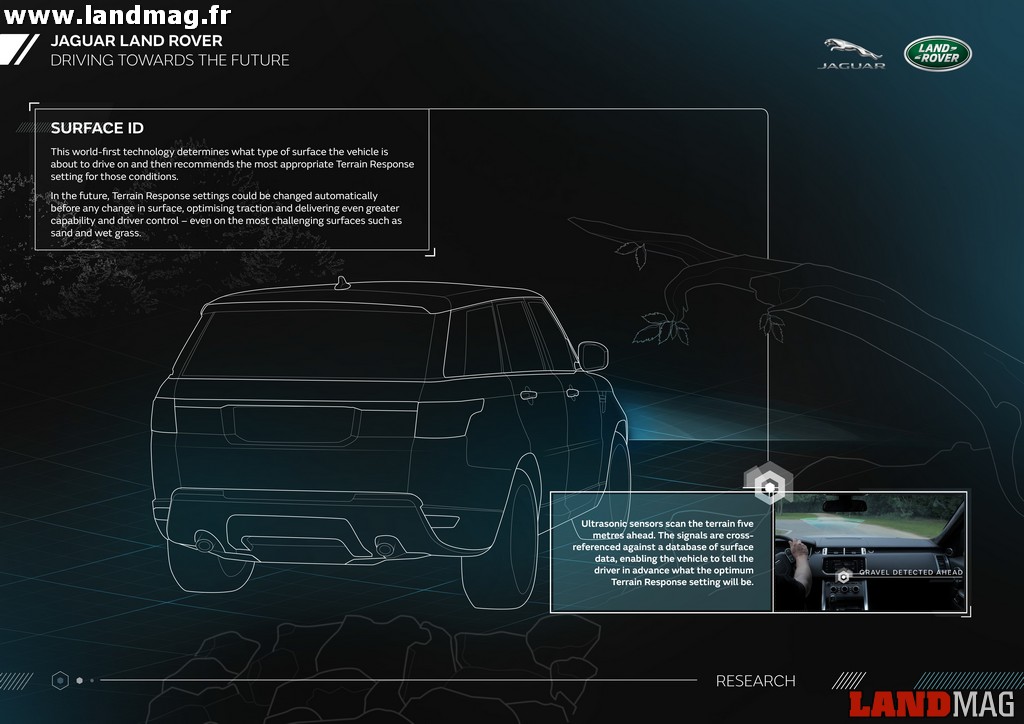
Identification des surfaces et capteurs 3D : une technique qui combine des caméras, des ultrasons, un radar et un LIDAR pour donner à la voiture une vue à 360 degrés du monde autour d’elle, avec des capteurs si avancés que la voiture pourrait déterminer les caractéristiques du terrain sur lequel elle évolue, même sous la pluie et la neige, pour planifier son itinéraire. Les capteurs à ultrasons peuvent identifier les conditions du terrain par un balayage jusqu’à cinq mètres devant le Land, et les paramètres du Terrain Response pourraient être automatiquement modifiées, par exemple avant que le Land passe du tarmac à la neige, ou de l’herbe au sable. Cela permettrait d’optimiser les performances tout-terrain, sans perte de vitesse ou de contrôle.

Overhead Clearance Assist : Pour compléter le tracé 3D, des branches en surplomb ou une barrière de parking doivent également être identifiés afin de déterminer si la route est libre. Ce système utilise une technologie de caméra stéréo pour numériser à l’avance les obstacles aériens. Le conducteur programme le système avec la hauteur du véhicule, qui peut inclure une galerie ou des vélos, et la voiture va avertir le conducteur en cas d’obstacle.
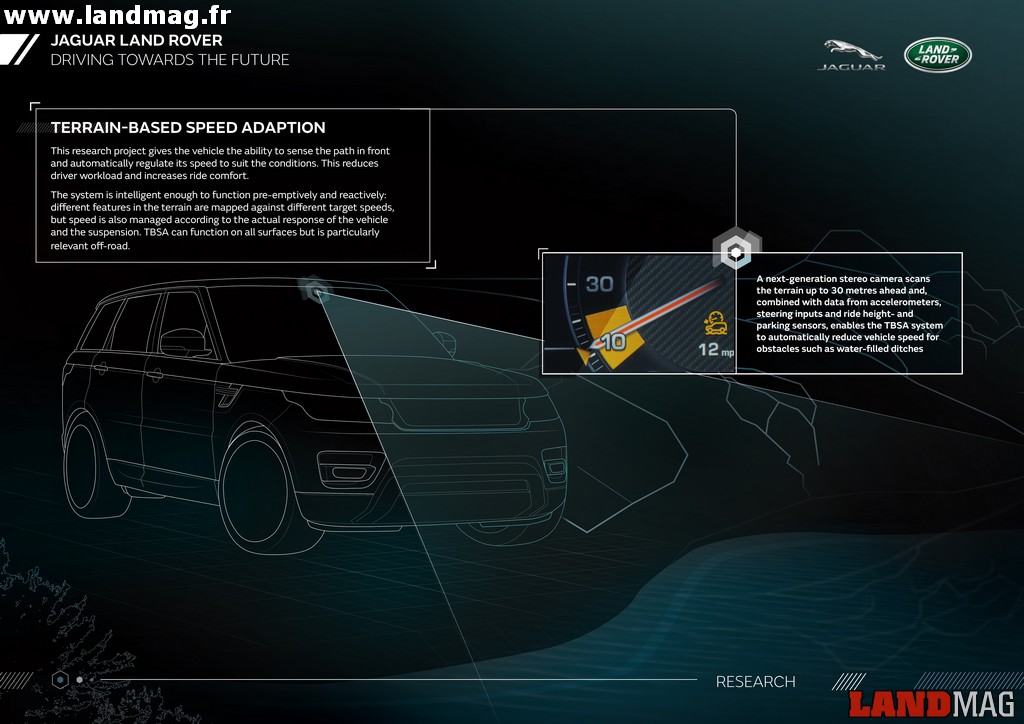
Terrain-Based Speed Adaption (TBSA) : Les capteurs peuvent également être utilisés pour analyser à l’avance la difficulté technique de la route ou de la piste, et réguler la vitesse du véhicule en conséquence. Le TBSA utilise des caméras pour détecter un terrain accidenté, y compris des surfaces inégales ou des dos d’ânes, des nids de poule et de l’eau stagnante. Il est alors assez intelligent pour prédire l’impact potentiel de ces surfaces sur le trajet de la voiture et ajuster automatiquement la vitesse.
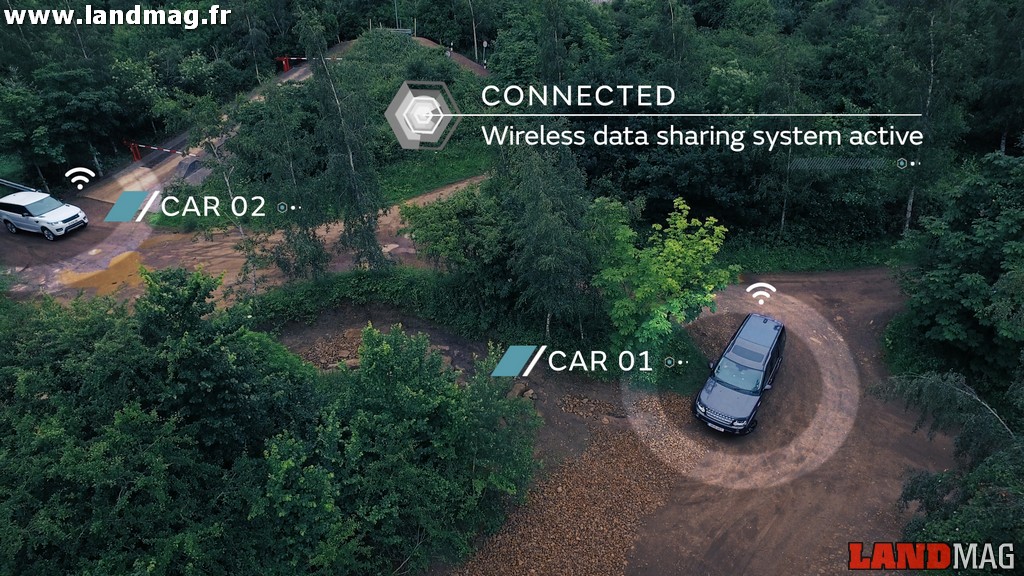
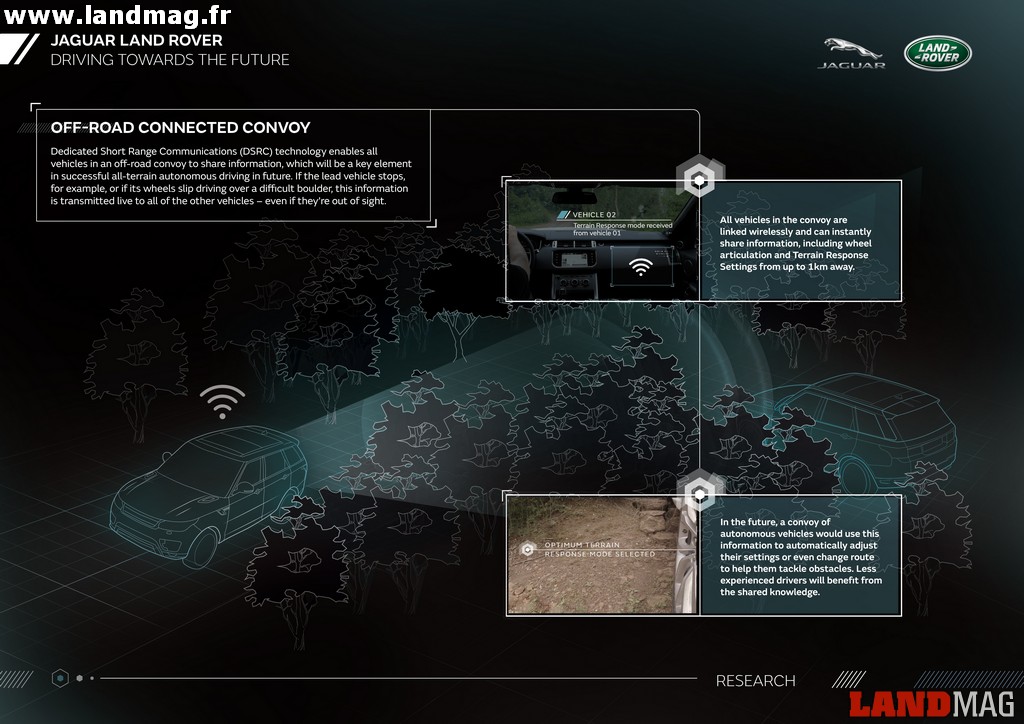
Dedicated Short Range Communications : Un autre élément essentiel à la réussite de la conduite autonome en tout terrain est la capacité des véhicules à communiquer les uns avec les autres, surtout si ils ne sont pas en contact visuel direct. Lors d’une démonstration en première mondiale, Land Rover a connecté deux Range Rover Sport ensemble en utilisant une technologie innovante (Dedicated Short Range Communications) DSRC pour créer un convoi connecté. Cette communication sans fil véhicule à véhicule (V2V) partgae plusieurs informations importantes : emplacement du véhicule, patinage des roues, modifications de la hauteur de suspension et de l’articulation des roues, paramètres du All-Terrain Progress Control (ATPC) et du Terrain Response.
« Nous ne voulons pas limiter les futures technologies autonomes au goudron. Lorsque le conducteur quitte la route, nous voulons que ces aides continuent à l’assister. À l’avenir, si vous appréciez les avantages du maintien automatique sur une file sur l’autoroute le matin, nous voulons nous assurer que vous pouvez utiliser cette technologie jusqu’à votre destination finale, même si cela implique une piste ou des chemins » explique Tony Harper, le responsable de ces programmes de recherche chez JLR. « Donc, que ce soit une route en construction avec des cônes et des véhicules en contresens, une route couverte de neige en montagne ou une piste forestière boueuse, cette technologie de pointe devra être disponibles pour le conducteur et la voiture autonome, le pilote devant pouvoir laisser la voiture prendre le contrôle s’il ne sait pas comment franchir un obstacle ou affronter un danger à venir. Nous sommes déjà leaders mondiaux dans les technologies tout-terrain: ces projets de recherche prolongeront encore notre avance ».

Quand ces technologies seront-elles disponibles ? On espère que la lecture du terrain en 3D puisse faire une première apparition sur le Discovery 5 qui sera dévoilé en septembre prochain. Mais les législations routières doivent elles aussi évoluer pour permettre l’utilisation des technologies de conduite autonome. C’est en tout cas un défi technologique d’importance pour Land Rover, qui avait pris de l’avance dans les années 90 avec le HDC puis le Terrain Control, qui ont bien évolués depuis. Mais on se dirige là vers une révolution… Ne manquez pas notre article avec les vidéos de ces nouvelles technologies en démonstration !




